



EE. UU.
“La forma en que tú y yo nos tomamos una selfie es sujetando una cámara con el brazo y tomando una sola imagen. La forma en la que el robot Perseverance se hace una foto de sí mismo, es un poco más compleja”, explicó Elio Morillo, ingeniero de sistemas del Mars Perseverance.
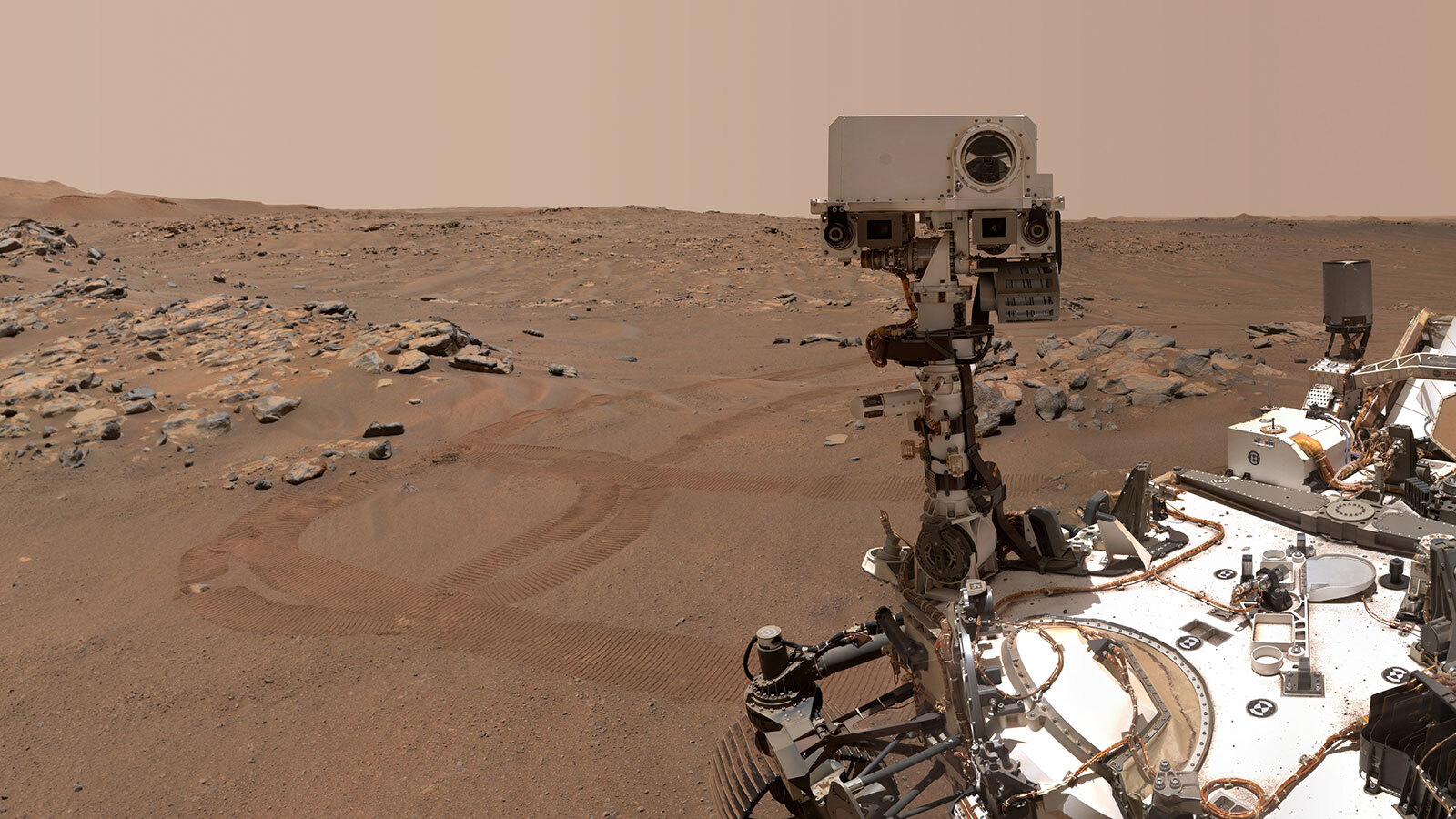
Para tomarse una selfie, el Rover usa la cámara Watson en el extremo del brazo robótico, pero esta cámara está diseñada para tomar imágenes de cerca, de rocas para análisis científico e incluso con el brazo completamente extendido no es posible abarcar todo el robot en una sola imagen. Por eso, con el equipo del Laboratorio de Propulsión a Chorro de la NASA, JPL en sus siglas en inglés, se toman varias imágenes y luego se ponen todas juntas para lograr una única.
Para lograrlo, se intenta mantener el sensor de la cámara Watson en la misma posición para tomar las diferentes fotos y, para que la cámara esté en la misma posición al tomar los diferentes fotogramas, puede que el brazo tenga que moverse bastante.
Puede llevar hasta una hora y se capturan varias imágenes para obtener una única selfie completa, la razón por la que no ves el brazo robótico en la selfie, es porque se mueve entre los diferentes fotogramas e incluimos suficiente margen para la superposición entre las imágenes, para que cuando las asumamos no tengamos que incluir el brazo.
Otra apasionante novedad en la misión de Perseverance es la inclusión de micrófonos, por primera vez se grabaron sonidos del brazo moviéndose mientras se tomaba la selfie. Se pueden oír claramente los sonidos de los frenos de los actores del brazo haciendo clic al abrir y cerrarse. Y a veces, cuando los motores cambian de velocidad, suena casi musical, como una flauta.
“Cuando tú y yo nos tomamos una selfie, simplemente levantamos el brazo y nos tomamos una sola imagen, para crear el primer selfie Perseverance fue necesario todo un equipo de personas trabajando juntas durante casi una semana entera, el resultado fue una selfie lograda a partir de 62 imágenes únicas”, detalló Morillo.
- Nancy Grace Roman, el nuevo telescopio de la NASA - junio 2, 2025
- ¿Por qué en un eclipse lunar total vemos a la Luna teñirse de rojo? - abril 14, 2025
- Los aprendizajes de Frank Rubio en sus caminatas espaciales - abril 7, 2025


